
NZ POLICE
CALIBRATION UNIT
Speed Detection Operators
Module
PHRIS Code 2277
DUT 244
Table of Contents
1.
About this module ...................................................................................................................... 3
2. Background
................................................................................................................................ 4
3. Radar
speed
detection
................................................................................................................ 7
4.
Self-paced test – Radar ............................................................................................................ 17
5. Laser
speed
detection
............................................................................................................... 18
6. Traffic
laser
.............................................................................................................................. 22
7.
Self-paced test – Laser ............................................................................................................. 24
8. Operating
guidelines ................................................................................................................ 25
9. Evidential
requirements
........................................................................................................... 27
10. Speed
detection
Code of Operations ........................................................................................ 28
11. Best practice guidelines - Radar .............................................................................................. 30
12. Best practice guidelines - Laser ............................................................................................... 31
13. Practical application - Radar .................................................................................................... 32
14. Practical application - Laser .................................................................................................... 37
15. Answers for self-paced test – Radar ........................................................................................ 40
16. Answers for self-paced test – Laser ......................................................................................... 42
November 2001
2
1.
About this module
Goal
This module is designed to provide the theoretical basis for the
safe and efficient operation of speed enforcement equipment.
Objectives
When you have completed this module you will be able to:
identify the requirements of the Code of Operations
explain:
pre-deployment testing
site selection
safety requirements
tracking history
outline the evidential requirements for speeding offences.
Module Content
This module contains the following sections:
background
radar speed detection
laser speed detection
operating guidelines
evidential requirements
speed detection Code of Operations
best practice guidelines for specified units
practical training
self-paced test answers.
Module and operators manual The manufacturer’s operational manuals for radar and laser
speed detection systems used by the NZ Police are inappropriate
for the New Zealand environment. For this reason this module
and the New Zealand Operators Manual are the only documents
detailing the manner of operation New Zealand operation.
Information
Should you have any questions or comments regarding this
module please contact:
Inspector Ron Phillips
Calibration Unit
Office of Commissioner
Phone 04 2372484 or Extn 42590
2. Background
Introduction
Research has shown that speed is a major contributor to fatal
and injury-causing road crashes. The Government has identified
increasing road safety as an important and core part of police
business. Significant improvements have been made in
enhancing road safety in the last few years. The aim of the NZ
Police is to ensure this trend continues by using a range of tools
including speed detection equipment.
Trained operators
For police members to use speed detection equipment they must
first be certified as a trained operator.
To become a certified operator you must:
complete this module
achieve a minimum of 70% in the module theory test
undergo 20 hours’ practical instruction with a qualified
instructor who will assess your competence
be certified as a trained operator by the Traffic Operations
Support Group (Office of Commissioner).
Twenty hours have been allocated for practical training. The
suggested breakdown of hours is 16 hours for radar training and
4 hours for laser training.
Speed enforcement detection
The speed detection operators’ module focuses on the use of
module
speed detection equipment. It provides an overview of the
operating principles and policy guidelines governing the use of
speed detection equipment. Evidential and administrative
requirements are covered to ensure all operators are able to
follow correct procedure.
Within the module there are two short tests. These are designed
so that you can measure your progress. At the end of the module
you must sit a formal theory test that will be administered by
district training staff. To pass the test you must gain a mark of at
least 70%. If you do not achieve this you will need to revise the
module and sit another test.
District training staff will keep a record of your test results and
enter them in your training records.
Practical
Once you have passed the test you will need to gain practical
experience operating the speed enforcement equipment. This
will take at least 20 hours and needs to be completed with a
qualified instructor. Your district trainer has a record of
approved instructors.
The practical part of the training is very important and provides
an opportunity for you to apply the theory in a practical setting.
November 2001
4
The qualified instructors have a training checklist they will use
with you to guide your training and to assess your competence.
A copy of this checklist is at the end of the module.
When you have completed the practical training and
demonstrated your competence in each area. The instructor will
forward evidence of this to the district trainer. This will be
entered in your training records.
Certified as a trained
Once you have successfully completed all parts of the training
operator
you will be certified. The district trainer will provide evidence
of your training to the district strategic traffic manager who will
advise the Traffic Operations Support Group (Office of
Commissioner) who will issue you a numbered certificate and
enter your details onto the national database of trained operators.
You must be certified by the Traffic Operations Support Group
and receive a certificate confirming you are a certified
operator before you can use speed detection equipment.
If for any reason you require an additional copy of this
certificate you should contact the Traffic Operations Support
Group directly.
Manufacturer’s manual
The manufacturer’s operational manuals for the various speed
detection systems used by NZ Police are inappropriate for the
New Zealand environment. They do not require a code of
operations, ongoing device calibration, daily device testing,
operator training, or a tracking history.
Code of Operations
In the interests of fairness, professionalism and accuracy the
Measurement Standards Laboratory New Zealand Limited and
the NZ Police have agreed to a Code of Operations that governs
the operation of all speed detection equipment used by the NZ
Police. The Code of Operations 2001 is the current code and a
copy is contained in this module.
Using this module
This module focuses on two types of speed detection equipment:
radar
laser.
Radar and laser describe the scientific methodology used to
detect vehicle speed Although there are some similarities
between the devices there are also some fundamental
differences. For this reason this module looks at each type
separately. The first part of the module deals with radar and the
second with laser. It is important that you note the similarities
and differences between the two types of device.
November 2001
5
Key information
The module contains a reasonable amount of detail. This is to
provide depth to your understanding of how the devices operate.
You do not need to remember all the information contained in
the module. However, there are some important things that you
must know. To help you identify the critical information, the
relevant sections are marked
key information in the left-hand
column.
Self-paced tests
Through the module you will find two self-paced tests. These
are available for you to test your own learning. The answers to
these tests are found at the end of the module.
When you have finished the module and feel you have
understood and can remember all the
key information material,
you need to sit the assessment test.
Assessment test
The assessment test is available from your district trainer. The
test is administered in exam conditions — this means you will
not have the module to help you and you will not be able to
discuss the questions with others.
You need to achieve a mark of at least 70% to pass the test. If
this does not happen you will be required to resit the test, which
will differ from the previous test.
PHRIS
PHRIS coding for the module is 2277.
PHRIS coding for practical training is 2287.
November 2001
6
3.
Radar speed detection
Introduction
Radar is an acronym for
RAdio
Detection
And
Ranging.
Radar means the transmission of radio waves that have the
ability to detect and provide the distance the object is away from
the transmission source.
History
The concept of radar was first discovered in 1904, but it was
during the Second World War that significant progress was
made in this area of research. New Zealand scientists who had
worked in this field during the war returned to work for the
Department of Science and Research and extended the
technology.
The world’s first working traffic speed detection radar was
developed in New Zealand in the late 1940s. In 1947 the first
traffic speed radar was trailed in Wellington.
From these humble beginnings radar devices have become an
integral part of the New Zealand road safety scene.
Although the models have changed and will continue to change,
the operating principles of radar devices remain the same.
The use of radar as a speed enforcement tool is not restricted to
New Zealand. Radar speed detection devices are widely used;
each year over 50 million enforcement notices are issued to
speeding drivers around the world.
Use of radar
Radar is present in everyday life; when we make a telephone
call, use the internet or watch television the information is
carried, at least part of the way, by microwave. (Microwave is
the radio frequency at which radar operates.)
Radar theory
The principle of primitive radar is can be explained simply. A
beam of microwave electromagnetic energy is generated at
super high frequency. This energy is radiated into free space
through a antenna at the speed of light. If the energy strikes an
object, part of the scattered energy is returned to the radar
through the antenna. The unit processes the return signals and
displays the information, the distance the object was from the
antenna.
Traffic radar
Traffic radar uses very low-powered, continuous microwave
energy. The receiver monitors the transmitter frequency and
compares the returned frequency with the transmitted frequency.
The change of frequency is displayed as the speed check.
The frequency change is due to the doppler shift, which is
explained later in the module. The receiver’s electronics change
the frequency into speed readings.
November 2001
7
Radar components
There are three basic components to traffic radar:
transmitter
receiver
antenna.
Key information The three components that make up traffic radar are the
transmitter, receiver and antenna.
To understand how traffic radar operates it helps to know the
function of each of component.
The transmitter
The transmitter generates radio energy in the microwave
spectrum from a low power gunn diode unit (this is the device
used to make microwave energy). This energy is then
channelled to the antenna with a small portion sent to the
receiver for a comparison between the original transmitted
signal and the received reflected signal.
Key information The transmitter generates energy. Most of the energy is
channelled to the antenna, a small amount goes to the
receiver.
The antenna
A narrow-beam, horn antenna is used to direct the microwave
energy and collect the reflected signal . The antenna is aimed at
the area to be monitored. The size of the antenna depends on the
frequency or signal wavelength used.
Key information The antenna is used to aim the microwave beam at the area
being monitored.
The receiver
The receiver is the device tuned to the transmission frequency
that picks up the waves generated by the transmitter. It amplifies
the small signal detected and produces the information as a
speed readout.
Key information The receiver is the unit that displays the speed readout.
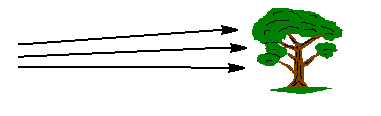
The radar beam
The beam of energy transmitted from the radar antenna is like a
torch beam. The radar signal continues outward from the
antenna until it is reflected (shined back), refracted (bent, like a
pencil placed in a glass of water) or absorbed.
The following diagrams demonstrate what happens to the radar
beam.
November 2001
8
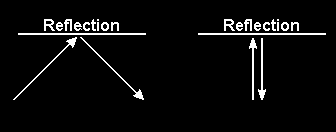
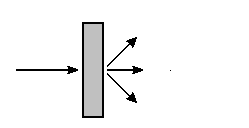
 Key information The radar beam continues outward until it is reflected,
refracted or absorbed.
Key information The radar beam continues outward until it is reflected,
refracted or absorbed.
Radar beam angle
The width of the radar beam is normally 12 degrees. This is
known as the main signal beam. The further the beam extends
from the transmitter the wider it becomes.
Key information The main signal beam becomes wider the further from the
transmitter it becomes.
Beam range
The radar beam could continue outward from the antenna for an
indefinite distance. However, in reality the beam range is the
distance that the radar signal can be reflected back from a target
to the receiver. The range differs depending on the site. Under
ideal conditions the device should be able to detect targets at a
distance of one kilometre.
November 2001
9
Key information The range of the radar beam differs depending on the site.
Factors affecting range
Atmospheric conditions such as rain, mist and fog will affect the
radar range and the return signal. Local terrain such as hills,
corners, fences and buildings will also have some effect.
All radar units have a range or sensitivity control that can be
adjusted to control the level of received return signal. By
adjusting the range you can reduce the target vehicle distance.
Key information Radar range can be affected by atmosphere and terrain.
Operators can alter the range by adjusting the target range
control.
Target reflectivity
The size and shape of the target vehicle’s surface will affect the
information sent back to the radar unit for processing into speed
readings. The bigger the target the better it will reflect the signal
back to the radar unit.
A target vehicle that is small and aerodynamically designed is a
poor reflector of a radar signal. This means it will need to be
closer to the unit to be picked up clearly.
Key information The size and shape of the target vehicle affects the strength of
the reflected signal.
Doppler effect
The speed radar detects a movement between the transmitted
and received signal. This change in frequency is known as the
doppler effect.
Simply, the radar unit determines the frequency difference
between the signal transmitted from the radar unit and the signal
reflected back from the moving target vehicle.
Key information The change in frequency between the signal transmitted and
the signal reflected back is the doppler effect.
Tuning forks
Vibrating objects produce sound waves. A tuning fork illustrates
how a vibrating object can produce sound. The fork consists of a
handle and two tines. When the tuning fork is hit, the tines begin
to vibrate causing disturbances in the surrounding air molecules
and producing a ringing sound.
This is why tuning forks are used as part of the calibration and
daily testing of the radar unit. A particular speed reading is
confirmed when the sound (frequency) the fork produces is the
same as the doppler frequency required. Each fork is stamped
with an operating band (frequency) and the speed the fork will
produce at that frequency.
November 2001
10
It is important to note that because the movement of air
molecules from the fork goes from left to right you should
always present the side of the tine to the antenna.
Tuning forks should not be hit against hard objects as the tines
will bend out of shape and lose their ability to vibrate. The new
flat type of fork can be flicked by a finger or lightly struck
against another fork to produce the required signal level to
conduct daily testing.
Key information Tuning forks are used to simulate speed. Each fork is stamped
with an operating band (frequency) and the speed the fork will
produce at that frequency. They are used to check the
accuracy of the speed reading.
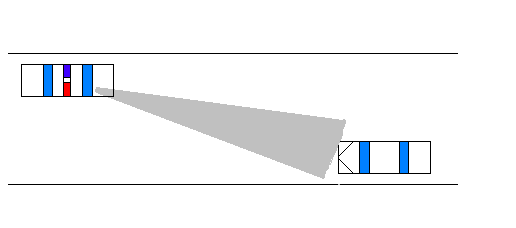
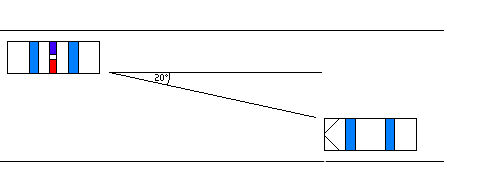
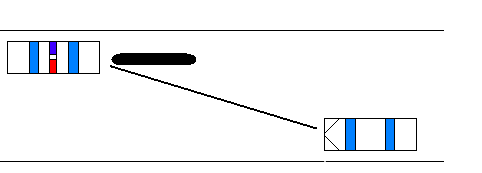
Cosine angle effect
In both stationary and moving modes a cosine angle effect
occurs when vehicles pass at an angle through the beam rather
than directly in line with it. The cosine angle is the angle
between the operator and the beam.
The effect is that measured speed will always be less than true
speed. This occurs because the measured speed will be equal to
the true speed less than the cosine of the angle between the
beam and direction of travel of the target vehicle.
The larger the cosine angle the lower the speed. At 90 degrees
there will be no reading as there is no relative motion between
the axis of the antenna and the target. The cosine of a target
travelling in a lane opposite the radar unit will always present a
lower reading than is true, as the target will be off to the side of
the main beam pointing down the road.
The following table and diagram demonstrate the effect of the
cosine angle.
100 km/h true speed of target
Radar antenna off
Speed in km/h
set angle to the
target vehicle
0 100
10 98.48
20 93.96
30 86.60
40 76.6
As the table shows, for every degree the radar is off-set to the
target vehicle the speed reading registers less than the true speed
of the target vehicle.
November 2001
11
The difference will always be in favour of the target vehicle.
Key information Aiming the radar beam so that the cosine angle is minimised
gives a more accurate reading. Any speed difference between
true speed and the recorded speed will always be in the favour
of the target vehicle.
Radar – Stationary mode
Site selection is extremely important when operating radar in a
stationary mode. An operator must consider both operation and
safety considerations when selecting a location.
An ideal site is straight for about 200 meters or more, with the
road surface slightly rising away from the radar unit and free
from undulations. Undulations will cause fading of the return
signal.
Key information When selecting a site operation and safety must be considered.
The radar beam is like a torch light beam. When setting up, the
operator should aim the antenna slightly towards the right-hand
side of the road. They should listen to the doppler tone to ensure
any targets are free from the fading that results if the antenna is
poorly aimed or a poor site has been selected. The aiming of the
beam is important to minimise the cosine effect and to obtain a
greater return signal.
Key information Correct aiming of the antenna minimises the cosine effect.
Range control
Adjust the range control to the required level to monitor target
vehicles.
Key information The range control should be adjusted to suit operational
conditions.
Site safety
When setting up a stationary site the operator should do so
without interfering with other traffic movements. The site
should allow the operator room to stop the offender using hand
signals without the need for pursuit. Safe and legal parking
should be available for the vehicles stopped.
The operator must make sure they and the target vehicle and
driver are safe when stopping them.
Reflective jackets maximise the operator’s visibility to road
users and enhance safety. They should be worn at all times.
November 2001
12
 Key information The operator is responsible for their safety and the safety of
other road users.
Key information The operator is responsible for their safety and the safety of
other road users.
Radar – Moving mode
The basics of stationary radar apply to radar used in moving
mode. However, there are some additional factors that must be
considered.
As a stationary radar, the antenna receives only one signal.
However, in moving mode there are two received signals both
with different doppler return frequencies.
Opposite lane mode
The operating principles of “opposite lane mode” are simple. A
single radar frequency is transmitted from the moving patrol
vehicle. A portion of this signal is reflected off the ground about
15 metres directly in front of patrol vehicle and returned to the
antenna. This is called “ground speed” and is displayed in the
patrol speed window as low doppler frequency shift.
The approaching target vehicle reflects a portion of the
transmitter signal, which is high doppler shift. As both vehicles
are moving towards each other the doppler shift frequencies
combine.
Example: A patrol vehicle travelling at 90 km/h and a target
vehicle travelling at 130 km/h produce a combined speed of
220 km/h. However, within the radar’s electronic processor
circuits, the radar unit subtracts the patrol ground speed from the
combined speed. This results in a target speed of 130 km/h.
It is very important that ground speed is obtained before any
target vehicle enters the beam. Without a ground speed reading
the unit cannot produce a target vehicle reading. Operators must
constantly monitor the patrol vehicle’s calibrated speedometer
to ensure the radar unit is displaying the correct ground speed.
Ground speed may be lost during heavy rain as the rain droplets
may absorb the radar signal. In this case operation of the device
should cease until the rain eases or stops.
November 2001
13
Ground speed
For the radar to operate in moving mode it must be able to
detect the ground speed of the patrol vehicle. There are times
when the traffic radar is unable to process ground speed and
when this happens the unit will show no speed readings. Ground
speed will be lost if:
the vehicle being detected is travelling at the same speed as
the patrol vehicle
there is heavy rain
the patrol vehicle is following a large vehicle, in which case
the ground speed beam may not obtain a reflection off the
road
the range control is turned down too low.
Key information Ground speed must be obtained before any target vehicle
enters the beam.
Same-lane mode
Same-lane mode is used for vehicles travelling ahead of and in
the same direction as the patrol vehicle. The unit calculates the
difference between the ground speed of the patrol vehicle and
the target vehicle and this is depicted on the speed readout.
Deployment
Tracking history
Obtaining a proper tracking history of the target will effectively
eliminate errors. Tracking history for all radar contains three
main elements:
visual observation
audio confirmation
radar verification.
Visual observation
There are three parts to visual observation, the operator must:
1 identify the target vehicle and continue to monitor its travel
2 confirm the target vehicle is within the radar’s range
3 estimate the target vehicle’s speed.
Audio confirmation
There are three parts to audio confirmation, the operator must:
1 listen for a clear doppler tone
2 check the tone is consistent with the speed
3 check the level of the signal heard is strong and not
fluctuating in audio content.
Radar verification
There are four parts to radar verification:
1 the initial reading is consistent with the operator’s visual
observation and operator-estimated speed
2 a steady target reading
3 readings consistent with visual observation and audio tone
4 ground speed readings confirmed by patrol speedometer.
When the operator is satisfied the target vehicle is producing the
correct reading they should lock the reading and take the
appropriate enforcement action. It is not always possible to lock
the target vehicle’s speed. However, failure to lock the speed
will not prevent normal enforcement action being taken.
November 2001
14
Possible sources of
In the super high frequencies of the spectrum where traffic radar
interference
operates (24-38 GHz) the environment is relatively free of noise
and other non-natural sources of interference. However,
interference may be experienced and it is important to know
how this occurs and what to do to eliminate it.
Many articles have been written about the types of interference
that will cause traffic radar to produce erroneous readings,
including:
street lighting systems
radar detectors
high voltage power lines
motor vehicle radiator fans
power transformers
neon signs
aircraft radar
microwave ovens.
These theories concerned the NZ Police and the Measurement
Standards Laboratory of New Zealand (MSLNZ). Tests were
conducted to determine if the potential interference sources
listed above had any effect on the traffic radar equipment used
by the NZ Police. No affects were found. A point to consider is
that aeroplanes contain more sensitive radar equipment than
traffic radar units. If the items listed above generated significant
interference radar would be too dangerous for planes to use.
Even though some conditions may cause occasional intermittent
readings, most interference sources do not produce any doppler
tone. If a clear doppler tone is obtained this will help to
eliminate possible sources of interference. By listening to the
audible signal the officer can determine:
when the target entered the beam
if the estimated speed of the target is consistent with
doppler tone
Note the higher the tone, the faster the target vehicle.
Radio transmitters
Radio energy detected near the traffic radar unit will blank off
any target readings, displaying “
rfi”. This tells the operator that
radio energy is present.
The radio energy from a patrol car radiotelephone or cross-link
will prevent readings when the radiotelephone is transmitting.
Radio jammers
Over the years many people have tried to defeat radar speed
equipment. Most of these radio jamming devices do not work
and are nothing more than gimmicks. Units that do work require
large amounts of radar energy to be transmitted and are
prohibited in New Zealand by the Radio Communications
regulations.
November 2001
15
Radar detectors
Radar detectors have a receiver that picks up the radar unit’s
transmitted energy and alerts the driver.
Operating the radar in hold mode means the transmitter is turned
off until required by the operator. The motorist with a radar
detector cannot be alerted to the radar when it is operating in
hold mode.
The operator can take the unit out of hold mode to obtain a
speed check and produce a valid speed-reading before the driver
has time to react.
November 2001
16
4.
Self-paced test – Radar
1.
What are the three units that comprise traffic radar?
2.
There are three things that can happen to a radar wave, what are they?
3.
How can you minimise the cosine effect when using radar?
4.
Who is permitted to use radar speed enforcement equipment?
5.
What is the antenna component of traffic radar used for?
6.
Does the width of the beam remain the same the further from the transmitter it is
emitted?
7.
What factors can affect the radar range?
8.
How can an operator reduce the target range?
9.
What affect does vehicle size and shape have on the strength of the reflected signal?
10.
There are two major things that you need to consider when selecting a stationary
operating site, what are they?
11.
Establishing tracking history for all radar speed checks requires three elements, what
are they?
12.
Within each of the three elements required to establish tracking history there are a
number of parts. Detail what these are for each tracking history element.
13.
What are the tuning forks used for?
14.
What is the doppler shift?
15.
Why is a certified speedo required when operating traffic radar?
16.
What reasons are there for loss of ground speed?
17.
Is it a requirement to lock every speed reading when conducting an enforcement stop?
November 2001
17
5.
Laser speed detection
Introduction
Laser is an acronym for
Light
Amplification by
Stimulated
Emission of
Radiation. A laser is a concentration of light energy
into a narrow beam.
Principles of laser energy
To better understand how laser energy operates it helps to
understand the principles of light. Light is defined in
wavelengths similar to radio waves. The shorter the wavelength,
the higher the frequency. Visible light falls into a fairly narrow
section of the electromagnetic wave spectrum with infra-red
light at one end with the longest wavelength, and ultraviolet
light at the other end with the shortest wavelength.
As with radio waves, light waves can be reflected, refracted or
absorbed. Reflection of light is commonly seen in day-to-day
life. Refraction is when light is bent. Absorption is when light is
incorporated into the surroundings.
Key information A laser is a concentration of light energy into a high intensity
narrow beam.
Lasers
To build a laser we begin with a light source. This is placed in a
small cavity with two mirrors facing each other with the light
source in between. As the light reflects from one mirror to the
other, it passes through the light source and concentrates its
energy.
Laser light is found only in technology, never in nature. The
beam used is very narrow, much narrower than other light
sources such as a torch. It is also monochromatic (a single
wavelength and colour) and its narrow beam expands only
slightly over distance.
Traffic laser
While the traffic laser and traffic radar have much in common
there are also many differences. Similarities and differences are
highlighted throughout this section of the module.
The traffic laser is an adaptation of laser to measure vehicle
speed. From the traffic laser unit laser light is directed through
focusing lenses toward the intended target.
The traffic laser beam is very small. Instead of radiating out like
a torchlight (or radar beam) the line of laser light is very straight
with little divergence. This allows the operator to aim the traffic
laser at target vehicles much further away than when using a
traffic radar with very high levels of accuracy.
November 2001
18
Components
Unlike the traffic radar, the traffic laser is one unit. This laser
unit transmits the laser beam and receives it. The internal
computer calculates the target vehicle’s speed from the changing
distance readings received.
How it works
The operator aims the traffic laser at the target vehicle using the
unit aiming device. The laser beam is emitted in pulses. When
each laser pulse makes contact with the target vehicle the laser
beam is reflected back to the laser unit. The internal computer
calculates the time between each pulse and the change in
distance between the unit and target vehicle. This enables the
computer to accurately calculate the change in each pulse
(time/distance) and provide a readout of the target vehicle’s
speed.
The traffic laser can be used to check the speed of vehicles
approaching the laser and vehicles that are moving away from
the laser. Where vehicles are moving away from the unit this is
indicated by a – sign in the display.
Beam range
In theory the laser beam will continue outward for an indefinite
distance. However, in reality the beam range is the distance that
the laser beam can be reflected back from the target to the laser
unit, normally about 800 metres.
Measurement of distance
Traffic laser devices can be used to measure distance. The
accuracy of this type of device is limited to +/- 1 metre over all
distances displayed. It may be used in this way at crash scenes
and for engineering purposes.
Key information The laser beam extends outwards for an indefinite distance
unless it is reflected or refracted.
Site selection
There are a number of things that need to be taken into account
when selecting a laser operating site, including:
the cosine angle
having a clear line of sight
weather conditions
whether the operation is from inside the patrol vehicle
movement of the unit.
Key information When selecting an operating site the operator needs to
consider:
the cosine angle
having a clear line of sight
weather conditions
whether the operation is from inside the patrol vehicle
movement of the unit.
November 2001
19
Cosine angle
As explained in the radar section, the cosine angle is the angle
between the operator and the beam. The position of the traffic
laser to the roadway creates an angle that reduces the speed
reading of the target vehicle. The greater the angle the greater
the effective speed reading. While the angle can not be
eliminated (to do so the operator would need to be in the middle
of the road), it can be minimised by the operator’s careful
positioning and aim.
Key information Correct sighting of the laser minimises the cosine effect.
Clear line of sight
The operator
must have a clear line of sight to the target
vehicle.
That means the operator must see the target vehicle clearly
throughout the speed check. If their line of site is blocked or
temporarily interfered with the computer will disregard all data
and no speed reading will be displayed. If the operator can see
the object, the laser can see the object; if the operator cannot see
the object, the laser will not see it either.
Key information There must be a clear line of sight to the target vehicle.
Weather conditions
Weather conditions are an important consideration in the
operation of the traffic laser. Fog, snow and heavy rain have the
potential to interfere with the laser’s operation. Therefore, traffic
laser is not to be used in fog, snow or heavy rain.
Key information Traffic laser is not to be used in fog, snow or heavy rain.
Operation from inside
The windscreen and side windows of the patrol vehicle can
vehicles
affect the maximum range of the traffic laser. While the system
is designed to operate through windows, window tinting,
infrared and ultraviolet protections can reduce the effective
range of traffic laser. However, while range is affected, the
accuracy of the speed reading is not.
The best way to use the traffic laser is outside the vehicle or
through an open vehicle window.
Movement of vehicle
Operator movement will affect the traffic laser. Where the
device is not held firm, keeping motion to a minimum, the unit
will not display a speed reading. The reading will return when
the device is stabilised.
November 2001
20
Other factors
A
sweep effect occurs when an operator changes aiming points
while conducting a vehicle speed check. When this happens, the
unit will not display a reading. To prevent this happening the
operator must aim at a single point on the target vehicle for the
entire check.
Reflection influences occur on very hot days by heat rising and
causing reflection off the road, or from water lying on the road.
To avoid this influence, the operator should aim at the vehicle
and pay attention to any changes in the speed reading. A good
tracking history will verify the speed readings are correct.
Night operation and headlights will reduce the range of the
traffic laser. The headlights of newer model cars emit high
levels of infrared light, so may interfere with the laser’s ability
to detect the reflected laser pulse. To avoid this problem the
operator should aim between the headlights at the number plate
area on the target vehicle.
Target vehicle
Similar to using the traffic radar, the range of the laser beam
will depend on the target vehicle’s size and shape.
A large flat truck acts as a very good reflector of signals.
Sports cars with an aerodynamic design act as poor reflectors.
November 2001
21
6. Traffic
laser
Introduction
The traffic laser can be operated only as a stationary device.
It may be used from inside or outside the patrol vehicle.
Key information The traffic laser can be used only as a stationary device.
Operating procedures
To maximise the deterrent effect of speed detection through
laser and ensure the safety of the public, the occupants of the
target vehicle and police, the following guidelines have been
developed.
Where traffic volumes are heavy only vehicles travelling on the
same side as the parked patrol vehicle are to be targeted.
Motorcycle use
Lasers are
not to be operated from motorcycles.
Tracking history
Like the radar, the traffic laser is only a tool used by the officer.
To establish that the speed check is accurate the operator must
establish a tracking history for the target vehicle. Tracking
history is obtained by three elements:
visual estimation of speed
audio tone confirmation
comparison of the digital readout with the operator estimate
of speed.
Key information Tracking history must be established using:
visual estimation of speed
audio tone confirmation
comparison of the digital readout with the operator
estimate of speed.
Sources of interference
Unlike radar devices, interference sources such as radios and
power lines do not have any effect on laser speed devices.
Anything the operator can see, the laser can see. If the operator
cannot see, the laser cannot see, for example, if smoke is
blowing across the road and blocking the operator’s view, the
laser will be prevented from detecting a target through the
smoke.
Locking on speed
Operators should lock on the speed reading and maintain it on
the device until the offender has had the opportunity to view the
reading. The only exception to this is when another officer is
November 2001
22
operating the device and is remote from the officer stopping the
offender. In this case a note should be made of the registered
number of the vehicle, vehicle speed and/or distance and time.
Recording speed readings
The speed and distance at which the vehicle was checked should
be recorded on all offence notices, for example 130km/h at 400
metres.
Targeting vehicles
Officers should target vehicles travelling on the same side of the
road as the parked police vehicle in areas where traffic volumes
are heavy.
Operating position
Officers may operate the device from any position, provided a
second patrol in radio contact is stationed on the road and is
responsible for stopping the offender.
Targeting traffic travelling
On roads with low traffic volumes and speeds restricted to no
both ways
more than 70 km/h, officers may target vehicles travelling in
any direction provided the method employed to stop the
offender is safe for all parties.
November 2001
23
7.
Self-paced test – Laser
1.
What sort of beam does a laser use?
2.
When selecting a site for operating a traffic laser what factors should be taken into
consideration?
3.
The traffic laser should not be used in certain weather conditions. Name these
conditions.
4.
What happens to the range if the laser is used through the windscreen of a patrol
vehicle?
5.
What effect does using the laser through the windscreen of a patrol vehicle have on
the accuracy of the unit’s speed reading?
6.
Where on a target vehicle should the laser be aimed?
7.
What effect do power lines have on laser units?
8.
When operating a laser how can the cosine effect be minimised?
9.
What effect does operator movement have on the target vehicle’s speed reading?
10.
When operating laser devices at night, what additional factors should operators
consider?
11.
Describe the effect that vehicle size and shape have when a traffic laser is operated.
12.
Which mode may the traffic laser be operated in? Stationary mode, moving mode or
both?
13.
What elements are required to establish tracking history?
November 2001
24
8. Operating
guidelines
All speed enforcement devices used by the NZ Police are
Accuracy
required to have regular accuracy checks. The following details
what checks are carried out and when they occur.
Certificate of accuracy
Section 146 of the Land Transport Act 1998 requires all
operational speed detectors’ certificates of accuracy be issued
within 12 months of the date the device is to be used in the
detection of offences. Only units with current certificates of
accuracy may be operated.
A series of electronic and road tests form the basis of the
certificate of accuracy. The responsibility for testing and
certification rests with the Police Calibration Unit, an
International Standards Accredited Laboratory, based in
Wellington.
All speed enforcement devices are calibrated every year on a
district-by-district basis or when a device has been serviced.
Whenever a device is serviced the unit is re-calibrated before
being placed back in service.
Key information A certificate of accuracy is required for all speed enforcement
units. This must be issued within 12 months of the date the
device is to be used.
The unit must be checked to see if currently certified before it
is deployed.
Speedo certificate
All police vehicles being used in conjunction with radar speed
detection must have a current speedo certificate of accuracy.
Section 146 of the Land Transport Act 1998 requires all speedo
certificates of accuracy to be issued within 12 months of the
date the device is used in the detection of offences.
Operators using radar devices must check that the vehicle they
are using has a current certificate of accuracy. This check is to
be carried out before deployment. Deployment is the
commencement of each shift.
Key information A speedo certificate of accuracy is required for all vehicles
used to operate radar units. This must be issued within 12
months of the day the vehicle is being used in conjunction with
radar equipment.
The speedo certificate of accuracy must be checked before the
unit is deployed.
November 2001
25
Testing
At the beginning of each shift operators must conduct the series
of tests prescribed in the best practice guidelines to ensure the
device is operating correctly. This means at the beginning of
every shift.
Pre-deployment tests include internal circuitry tests and other
tests specified in the best practice guidelines for each device. A
copy of the best practice guidelines for each device is at the end
of this module.
The operator must record the test results in the device logbook.
If the speed detection unit fails any checks it is not to be used.
Key information The operator must complete the pre-deployment tests before
using the device. Results of the tests must be recorded in the
logbook. If the unit fails any checks it must not be used.
Logbooks
Operators must complete the following information in the unit
logbook:
member’s name and QID
date and time of operations
test results
location
total hours of use
signature of operator
The operator must fill in a separate log sheet for each day of
operation.
Faulty units
If the device fails any tests it should not be used. The unit must
be returned to the New Zealand service agent who has been
appointed by the manufacturer.
When an instrument used in the testing of a speed enforcement
device (for example, a tuning fork) malfunctions then both the
unit and all testing equipment should be packaged together and
sent to the New Zealand service agent.
Details of the authorised service agents can be obtained from the
Police Calibration Unit.
After servicing by the agent, the unit will be re-calibrated by the
Police Calibration Unit before being returned to the district. All
costs associated with repair will be charged to the district.
November 2001
26
9. Evidential
requirements
Documentary evidence
To comply with evidential requirements the operator will need:
a copy of the speed device logbook relating to the day in
question
a copy of the certificate of accuracy issued within a year of
the date of the offence
a copy of the certificate of accuracy for the patrol vehicle
used in the operation of the radar device or
a copy of the certificate of accuracy for the patrol vehicle
used for the weekly check in the case of a laser device.
Evidence in court
The operator must be able to give in evidence that:
they are an approved speed enforcement operator
they conducted the required tests for the unit and found it to
be working correctly
a tracking history was established for the target vehicle
the code of operations was complied with.
November 2001
27
10. Speed detection Code of Operations
This Code of Operations governs the operation of all speed detection equipment used by the New
Zealand Police. It has been jointly prepared and agreed to by the Measurement Standards
Laboratory of New Zealand (MSLNZ) and the New Zealand Police.
Operators
1 Trained
Operators
Except for the purposes of instruction, speed detection equipment is to be operated only by
members of the NZ Police who have:
completed the speed detection operators module
achieved a minimum of 70% in the module theory test
undergone 20 hours, practical instruction with a qualified instructor and demonstrated
competence
been certified as a trained operator by the Traffic Operations Support Group (Office of
Commissioner).
Former members of the Traffic Safety Service who completed training in the use of speed
detection equipment prior to 1992 are deemed to be qualified operators. This covers members
whose identification numbers begin E002 up to and including F116.
2 Qualified
Instructors
District Strategic Traffic Managers have the authority to appoint qualified instructors. To be
appointed as a qualified instructor, staff must have been certified as a trained operator and:
Have spent at least two years consistently operating speed detection equipment
are currently using speed detection equipment as part of their duties
have the ability to train others
Qualified instructors
must be registered with the Traffic Operations Support Group (Office of
Commissioner) before taking up a qualified instructor role.
Equipment
3
Certificate of Accuracy
Section 146 of the Land Transport Act 1998 requires all operational speed detectors certificates of
accuracy to be issued within 12 months of the date used in the detection of offences. Only units
with current certificates of accuracy may be operated.
A series of electronic and road tests form the basis of the issue of the certificate of accuracy. The
responsibility for testing and certification rests with the Police Calibration Unit, an International
Standards Accredited Laboratory, based in Wellington.
November 2001
28
4 Speedo
Certificate
All police vehicles being used in conjunction with radar speed detection and the field testing of
laser speed detection equipment must have a current speedo certificate of accuracy. Section 146
of the Land Transport Act 1998 requires all speedo certificates of accuracy to be issued within 12
months of the date used in the detection of offences.
5 Servicing
Repairs and servicing are only to be carried out by authorised service agents. Details of
authorised service agents are maintained by the Calibration Unit.
Pre-deployment
6 Testing
At the beginning of each deployment operators must conduct the series of tests prescribed in the
best practice guidelines to ensure that the device is operating correctly. The operator must record
test results in the device logbook. If the speed detection unit fails any checks it is not to be used.
Deployment
7 Tracking
History
A tracking history of a vehicle must be established. Tracking history for all speed detection units
contains three main elements:
visual observation
audio confirmation
verification by a speed detector.
To eliminate errors effectively, all three elements must be present for each speed check.
For radar units operated in moving mode, the vehicle ground speed must be confirmed by certified
speedometer.
8
Multiple Vehicles in Beam
Where there is more than one vehicle in the beam, enforcement action may be taken, providing the
operator can give evidence relating to the tracking history of other vehicles and the offender’s
speed.
9 Fairness
Operators must use their training and experience to ensure that there are no significant sources of
reflection or interference in the vicinity of the offence. If there is ever any doubt concerning the
speed check or the operation of the speed detection unit, no action is to be taken.
……………………………………………. ………………………………………………
Dr
Tim
Armstrong
Steve
Fitzgerald
Manager Time and Frequency Standards
National Manager, Road Safety
Measurement Standards NZ Ltd
NZ Police
Date : 25 September 2001
Date : 25 September 2001
November 2001
29
11. Best practice guidelines - Radar
Pre-deployment tests
These are tests that are carried out before commencing speed
enforcement patrol.
Check the device is certified. A sticker is attached to the
unit that needs to be visually checked to confirm the date
for next calibration is in the future.
Check the speedo of the patrol vehicle has a current
certificate of accuracy. This provides the speedo readings
are the true speed readings for the patrol vehicle.
Switch on the device. Ensure all segments of the display are
operating. As the unit is turned on it will automatically run
through a series of internal tests. If these tests fail or if any
segment of the unit readout is not operating check to see the
power source and connections are in place. Turn the device
on again. If these tests fail again remove the unit from
service and forward it to the service agent.
Complete the tuning fork tests. The details of how these
tests are completed are contained in each device’s NZ
Police Operators Manual. Record the results in the logbook.
Tuning fork tests are completed for each antenna.
Note: all antennas must be checked.
Deployment tests
These are the tests that are completed while the unit is being
used in moving mode:
Confirm patrol vehicle speed is consistent with the speed
readout on the unit within +/- 3 km/h. This is achieved by
travelling at a consistent speed, appropriate to the speed
limit being operated in, and checking that the true speed
(according to the certificate of accuracy) is the one
displayed on the readout. Record the results in the logbook.
November 2001
30
12. Best practice guidelines - Laser
Pre-deployment tests
These are tests that are carried out before commencing speed
enforcement patrol.
Check the device is certified. A sticker is attached to the
unit that needs to be visually checked to confirm the date
for next calibration is in the future.
Turn the unit on and check all display segments are
operating. The device will conduct a number of self-tests,
commencing automatically. If the device is not operating or
if readout displays are not functioning check the power
supply and retest the unit. If these tests fail again remove
the unit from service and forward it to the service agent.
Conduct the sight alignment test. This is carried out every
day the device is used. Select a pole or similar fixed point
marker and aim the unit sighter to the centre of the fixed
object; record the distance. Move the aim of the laser to the
left-hand side of the fixed point and check that the unit
ceases the reading on the fixed point as soon as the aim is
moved. Repeat this test but instead of moving the aim left,
move to the right-hand side of the fixed point. Repeat twice
more, moving the aim above and below the fixed point. The
measurement displayed on the readout unit must be
recorded in the logbook.
Weekly testing
On a weekly basis the laser unit readout needs to be
checked using a drive though by a patrol vehicle with a
certified speedo. This is carried out by having the driver of
the vehicle drive at a steady speed towards the laser
operation area. The speed will be relevant to the area of
operation. The driver should flash their headlights or advise
using the radio when the vehicle speed is steady and the
laser operator will check the speed. The member using the
laser will advise the vehicle driver of the results of the
speed check. The driver will advise the speed they were
travelling at after checking the certificate of accuracy to
determine the true speed. Where the margin of error exceeds
+/- 3 km/h the unit is to be withdrawn for servicing. The
results of the check must be recorded in the logbook
(vehicle speed/checked speed), for example 64/65; 46/46;
75/75.
November 2001
31
13. Practical application - Radar
Training
The code of operations requires members to receive 20 hours’
practical training in the operation of speed enforcement
equipment. This consists of both radar and laser training. The
suggested breakdown of hours is 16 hours for radar and 4 hours
for laser. The following provides details of what operators must
be able to demonstrate before they can be assessed as competent
users.
Pre-deployment tests
Pre-deployment refers to the beginning of each shift.
Certification
The operator must:
Check the certification sticker on the side of the device for
the expiry date.
Explain that if the date is current the device can be used,
otherwise the device must be recertified before use.
Identify who carries out recertification.
Check the certificate of accuracy for the speedo of the patrol
vehicle and determine its status — the test date must be
within 12 months from the date of operation.
Identify the difference, if any, between true vehicle speed
and actual vehicle speed readings.
Explain that for speed enforcement the true speed as
described in the certificate of accuracy is the speed used for
testing the device.
Unit testing
The operator must:
Assemble the radar device and install it in the vehicle.
Connect cables and power supply correctly.
Turn the device on and allow it to run its internal testing
sequence.
Check all readings are displayed completely, that means
there are no missing portions of letters or numbers.
Explain how to recheck and retest the device if the power
supply or readout does not work, by:
rechecking cables
checking connections
confirming the power source connection
turning the device off and restarting it
proceeding with the internal test sequence.
November 2001
32
Tuning fork tests
The operator must:
Remove the tuning fork from storage.
Confirm the serial numbers on the tuning fork are the same
as listed on the certificate of accuracy for the radar device.
Record the tuning fork’s serial numbers in the logbook.
Conduct the tuning fork test sequence as detailed in the unit
operators manual.
Record the results of the tuning fork tests in the logbook.
Conduct the testing sequence for each antenna.
Deployment tests
Moving mode
The operator must:
Confirm the patrol vehicle speed is consistent with the
speed readout on the unit within +/-3 km/h. This is achieved
by travelling at a consistent speed, appropriate to the speed
limit of the area and checking that the true speed (according
to the certificate of accuracy) is the one displayed on the
readout.
Record the results in the logbook.
Target identification
The operator must identify the target vehicle when it comes into
the beam.
Tracking history
The operator must demonstrate that they are able to establish the
tracking history of a vehicle. This means they:
See the target vehicle and specify what it looks like, for
example, a red Toyota or blue Mazda.
View the readout on the unit and identify to which vehicle it
relates.
Hear the change in audio (doppler tone) to indicate an
increase or decrease in speed.
Cosine effect
The operator must:
Identify the target vehicle (using tracking requirements).
Use the antenna to demonstrate how a change in cosine
angle affects the speed reading.
Speed checks
The operator needs to be able to gauge the speed of vehicles
visually.
Day
In stationary mode, the instructor covers the speed readout
and the operator estimates the speed. The instructor checks
this against the readout. The difference between the two
speeds needs to be within +/- 8 km.
The operator must achieve 10 consistent speed
confirmations within +/- 8km.
Repeat this exercise, with the operator covering the readout
with the doppler tone turned down. The difference between
the speeds needs to be within +/- 8 km.
November 2001
33
The operator must achieve 10 consistent speed
confirmations within +/- 8km.
Night
In stationary mode, the instructor covers the speed readout
and the operator estimates the speed. The instructor checks
this against the readout. The difference between the two
speeds needs to be within +/- 8 km.
The operator must achieve 10 consistent speed
confirmations within +/- 8km.
Repeat this exercise, with the operator covering the readout
and the doppler tone turned down. The difference between
the speeds needs to be within +/- 8 km.
The operator must achieve 10 consistent speed
confirmations within +/- 8km.
Site selection
The operator must select a site for operation of the radar in
stationary mode. Selection must include the following
considerations.
Parking
The operator must consider:
Legal parking for the patrol vehicle.
Location safety for the patrol vehicle, including the officer’s
ability to open the patrol car door safely, exit the patrol car,
approach the offending vehicle, and conduct an enforcement
stop.
The range of radar operation within 250 metres of any
change in speed limit.
Legal parking in which to stop vehicles.
Safe parking for offending vehicles, including the ability of
the driver to safely exit their vehicle and a safe approach for
the officer.
Day-time and night-time operation issues.
Site
The site must:
Be straight enough to allow vehicles to be detected for at
least 100 metres.
Provide sufficient distance to allow the speed to be checked
and the operator to exit the vehicle and conduct an
enforcement stop.
Unit set up
Aim
The operator must check the unit antenna:
is aimed and set up to:
detect vehicles
minimise the cosine angle and
the range is adjusted so that it is appropriate for the site
November 2001
34
Moving mode
The operator must:
Identify ground speed on the readout.
Confirm the ground speed and speedo readout are consistent
(given the certificate of accuracy).
Place the unit in hold mode using the hold button.
Release the lock button for device operation.
Identify the target vehicle and its speed.
Establish a tracking history for the target vehicle using the
three elements - visual, audio and readout.
Lock the target vehicle speed on the unit.
Indicate the difference between multiple vehicles in the
beam and a single vehicle.
Patrol stops – moving mode
Same lane
The operator must:
Identify a target vehicle where its speed exceeds the posted
speed limit.
Establish a tracking history by telling the instructor how it
meets audio, visual and readout requirements.
Lock on the target vehicle’s speed.
Activate red and blue lights.
Pull out into the flow of traffic safely.
Indicate to the target vehicle to stop.
Park safely.
Ensure the reflectorised jacket is worn.
Exit the patrol vehicle after checking for traffic.
Approach the target vehicle’s drivers door.
Keep following traffic in line of sight when speaking with
the driver.
Patrol stops – moving mode
Opposite lane
The operator must:
Identify a target vehicle where its speed exceeds the posted
speed limit.
Establish tracking history by telling the instructor how it
meets audio, visual and readout requirements.
Lock on the target vehicle’s speed.
Activate red and blue lights.
Complete a U-turn safely and with due consideration to
minimise stress on the patrol vehicle (for example, speed is
reduced before turning, the kerb is not mounted when
turning).
Indicate to target vehicle to stop.
Park safely.
Ensure reflectorised jacket is being worn.
Exit patrol vehicle after checking for traffic.
Approach target vehicle’s drivers door.
Keep following traffic in line of sight when speaking with
driver.
Issuing notice
The operator must:
Record the driver’s details on the notice.
Identify the appropriate offence.
Check the infringement fee is correct for the charge.
Record the appropriate precedent code.
November 2001
35
Record the unit details accurately on the notice.
Record a summary of the offence on the reverse of the
notice.
Complete all parts of the notice.
November 2001
36
14. Practical application - Laser
Training
The code of operations requires members to receive 20 hours’
practical training in the operation of speed enforcement
equipment. This consists of both radar and laser training. The
suggested breakdown of hours is 16 hours for radar and 4 hours
for laser. The following provides details of what operators must
be able to demonstrate before they can be assessed as competent
users.
Pre-deployment tests
Certification
The operator must:
Check the certification sticker on the side of the device for
the expiry date.
Explain if the date is current the device can be used,
otherwise the device must be recertified before use.
Identify who carries out recertification.
Unit
testing
The operator must:
Connect the unit to the power supply correctly.
Turn the device on and allow it to run its internal testing
sequence.
Check all readings are displayed completely, that means no
missing portions of letters or numbers.
Explain how to recheck and retest the device if the power
supply or readout does not work by:
rechecking cables
checking connections
confirming the power source connection
turning the device off and restarting it
proceeding with the internal test sequence.
Pre-deployment
Pre-deployment refers to the beginning of each shift.
Sight alignment test
The operator must:
Select a pole or fixed post object.
Aim the sighting device at the object and gain a distance
reading, this is the reading between the device and the fixed
point.
Obtain a distance reading and advise the instructor of that
reading.
Move the laser aim from the fixed point to the left away
from the point, and check the distance reading ceases on
movement from the aimed point.
Move the laser aim from the fixed point to the right away
from the point, and check the distance reading ceases on
movement from the aimed point
November 2001
37
Move the laser aim from the fixed point above the point,
and check the distance reading ceases on movement from
the aimed point.
Move the laser aim from the fixed point below the point,
and check the distance reading ceases on movement from
the aimed point.
Record the test results in the unit logbook.
Weekly testing
The operator must provide instructions to the driver of a patrol
vehicle to conduct the weekly drive-through test. The operator
must:
Establish that the vehicle has a current certificate of
accuracy.
Instruct the driver to drive towards the unit at a constant
speed.
Instruct the driver to flash their headlights or advise using
the radio when the check to commence.
Lock on the speed of the target patrol vehicle.
View the readout and ask the driver of the target patrol
vehicle for their true speed.
Confirm the target patrol vehicle speed and the readout on
the unit is within +/- 3 km/h.
Record the test results in the logbook.
Target identification
The operator must identify which vehicle is being detected
when a vehicle comes into the beam.
Tracking history
The operator must establish a tracking history of a vehicle. This
means:
Seeing the target vehicle and specifiying what it looks like,
for example a red Toyota.
Viewing the readout on the unit and identifying to which
vehicle it relates.
Hearing the change in audio that indicates an increase or
decrease in speed. Prolaser II and III do not give true audio
tracking.
Cosine effect
The operator must establish the target vehicle (using tracking
requirements).
Speed checks
The operator must gauge visually the speed of vehicles.
The instructor covers the speed readout and the operator
estimates the speed. The instructor checks this against the
readout. The difference between the two speeds needs to be
within +/- 8 km/h.
The operator needs to achieve 10 consistent speed
confirmations within +/- 8km/h.
The instructor repeats this exercise with the operator
covering the readout and the audio tone turned down. The
difference between the speeds needs to be within +/- 8
km/h.
The operator needs to achieve 10 consistent speed
confirmations within +/- 8km/h.
November 2001
38
Night
The instructor covers the speed readout and the operator
estimates the speed. The instructor checks this against the
readout. The difference between the two speeds needs to be
within +/- 8 km/h.
The operator needs to achieves 10 consistent speed
confirmations within +/- 8km/h.
The instructor repeats this exercise with the operator
covering the readout and the audio tone turned down. The
difference between the speeds needs to be within +/- 8
km/h.
The operator achieves 10 consistent speed confirmations
within +/- 8km/h.
Site selection
The operator must select a site for operation of the laser in
stationary mode. Selection must include the following
considerations.
Parking
The operator must consider:
Legal parking for the patrol vehicle.
Location safety for the patrol vehicle, including the officer’s
ability to open the patrol car door safely, exit the patrol car,
approach the offending vehicle, and conduct an enforcement
stop.
The range of laser operation is not within 250 metres of any
change in speed limit.
Legal parking in which to stop vehicles.
Safe parking for offending vehicles, including the ability for
the driver to safely exit their vehicle, and a safe approach
for the officer.
Day-time and night-time operation issues.
Site
The operating site must be straight for approximately 250
metres.
Unit set up
Aim
The operator must check the unit is:
aimed and set up to
detect vehicles
minimise the cosine angle, and
the range is adjusted so it is appropriate for the site.
Issuing notice
The operator must:
Record the driver’s details on the notice.
Identify the appropriate offence.
Check the infringement fee is correct for the charge.
Record the appropriate precedent code.
Record the unit’s details accurately on the notice.
Record the summary of the offence on the reverse of the
notice.
Complete all parts of the notice
November 2001
39
15. Answers for self-paced test – Radar
1.
What are the three units that comprise traffic radar?
Transmitter, receiver and antenna.
2.
There are three things that can happen to a radar wave, what are they?
A radar wave can be reflected, refracted or absorbed.
3.
How can you minimise the cosine effect when using radar?
Aiming the radar beam so that the angle between the radar and the target vehicle
will minimise the cosine effect. Any speed difference between true speed and the
recorded speed will always be in the favour of the target vehicle.
4.
Who is permitted to use radar speed enforcement equipment?
Only police members who have been certified as trained operators are permitted to
use radar speed enforcement equipment. This requires the member to have
completed this module, achieved a minimum score of 70% in the test, undertaken 20
hours’ practical instruction with an approved instructor who will certify the
member’s competence, and been issued a certificate from Traffic Operations
Support Group (Office of Commissioner).
5.
What is the antenna component of traffic radar used for?
The antenna is used to aim the microwave beam at the area being monitored.
6.
Does the width of the beam remain the same the further from the transmitter it is
emitted?
No, the further the beam extends from the radar the wider it becomes.
7.
What factors can affect the radar range?
Weather conditions such as rain, mist and fog will affect the radar range. Local
terrain such as hills, corners, fences and buildings will also have some effect. Road
undulations will also reduce the range and cause fading to the return signal.
8.
How can an operator reduce the target range?
The range control is used to reduce range.
9.
What affect does vehicle size and shape have on the strength of the reflected signal?
The size and shape of the target vehicle’s surface will affect the information sent
back to the radar unit. The bigger the target the better it will act to reflect the signal
back to the radar unit. A target vehicle that is small and aerodynamically designed
is a poor reflector, which means it will need to be closer to the unit to be picked up
clearly.
10.
There are two major things that you need to consider when selecting a stationary
operating site, what are they?
Operation and safety are the two major considerations when selecting a site for
stationary mode operation.
November 2001
40
11.
Establishing tracking history for all radar speed checks requires three elements, what
are they?
visual observation
audio confirmation
radar verification.
12.
Within each of the three elements required to establish tracking history there are a
number of parts. Detail what these are for each tracking history element.
visual observation
1. identify the target vehicle and continue to monitor its travel
2. confirm the target is within the radar’s range
3. estimate the target’s speed
audio confirmation
1. listen for a clear doppler tone
2. check the doppler tone is consistent with the speed.
3. check the level of the signal heard is strong and not fluctuating in audio
content
radar verification
1. check the initial reading is consistent with visual observation and the
operator estimated speed
2. ensure a steady target reading
3. check the readings are consistent with both visual observation and audio
tone
4. confirm ground speed readings by patrol speedometer
13.
What are the tuning forks used for?
Tuning forks are used to simulate speed. Each fork is stamped with an operating
band and speed and the fork will produce this when struck. It is then used to test
that the unit is detecting the speed accurately.
14.
What is the doppler shift?
The speed radar detects a movement between the transmitted and received signal.
This change in frequency is known as the doppler shift. Simply, the radar unit
determines the frequency difference between the signals transmitted from the radar
unit and the signals reflected from the moving target vehicle. The change in the
tone in the speaker is the doppler shift frequency.
15.
Why is a certified speedo required when operating traffic radar?
As part of the accuracy testing of the unit the speed of the patrol vehicle is checked
against the patrol speed detected by the radar unit. Before using the unit the match
between the patrol speed and the speed detected by the unit must be within +/- 3
km/h. This is used to confirm unit accuracy.
16.
What reasons are there for loss of ground speed?
Ground speed may be lost because of rain, a wet road surface, a badly sighted
antenna, or when the hold button is released without a clear road in front (the
device becomes confused and no reading is shown).
17.
Is it a requirement to lock every speed reading when conducting an enforcement stop?
While it is preferred that the target vehicle speed is locked on before an enforcement
stop, this is not essential.
November 2001
41
16. Answers for self-paced test – Laser
1.
What sort of beam does a laser use?
A laser is a concentration of light energy into a high intensity beam.
2.
When selecting a site for operating a traffic laser what factors should be taken into
consideration?
The operator must consider:
the cosine angle
a clear line of sight
weather conditions
whether the operation is from inside the patrol vehicle
movement of unit
other factors, such as sweep effect, reflection influences and night
operation.
3.
The traffic laser should not be used in certain weather conditions. Name these
conditions.
The traffic laser should not be operated in fog, snow and heavy rain.
4.
What happens to the range if the laser is used through the windscreen of a patrol
vehicle?
Range is reduced if used through the windscreen of a patrol vehicle.
5.
What effect does using the laser through the windscreen of a patrol vehicle have on
the accuracy of the unit’s speed reading?
Although range is reduced there is no effect on the accuracy of speed readings.
6.
Where on a target vehicle should the laser be aimed?
The operator should aim the laser between the headlights at the number plate of the
target vehicle.
7.
What effect do power lines have on laser units?
Power lines have no effect on laser units.
8.
When operating a laser how can the cosine effect be minimised?
The position of the traffic laser to the roadway creates an angle that reduces the
speed reading of the target vehicle. While the angle cannot be eliminated entirely (to
do so the operator would need to be in the middle of the road), it can be minimised
by the operator reducing the angle to a minimum.
9.
What effect does operator movement have on the target vehicle’s speed reading?
Operator movement cause the laser unit speed reading to disappear. The speed
reading will return when the device is stabilised.
November 2001
42
10.
When operating laser devices at night-time, what additional factors should operators
consider?
Night operation and headlights will reduce the range of the traffic laser. Headlights
of newer cars may also interfere with the laser’s ability to detect the reflected laser
pulse. To avoid this, the operator should aim between the vehicle’s headlights at the
number plate area.
11.
Describe the effect that vehicle size and shape have when a traffic laser is operated.
The larger the vehicle the easier it is to detect. Small, aerodynamically designed
vehicles are harder to detect and will be closer to the laser before a reading is
obtained.
12.
Which mode may the traffic laser be operated in? Stationary mode, moving mode or
both?
Laser is operated in stationary mode only.
13.
What elements are required to establish tracking history?
Tracking history is established using:
visual estimation of speed
audio tone
comparison of the digital readout with the operator estimate of speed.
November 2001
43